|
ADBLib
0.5
A simple library for rapid robot code development
|
|
ADBLib
0.5
A simple library for rapid robot code development
|
< For internal use by Controller. More...
#include <Controller.h>
Public Attributes | |
| double | maxVal |
| Minimum value for a joystick. Allows control scaling. More... | |
| double | minVal |
| Maximum value for a joystick. Allows control scaling. More... | |
| double | deadzone |
| Deadzone to use. More... | |
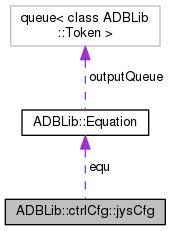
| Equation | equ |
< For internal use by Controller.
| double ADBLib::ctrlCfg::jysCfg::deadzone |
Deadzone to use.
| Equation ADBLib::ctrlCfg::jysCfg::equ |
| double ADBLib::ctrlCfg::jysCfg::maxVal |
Minimum value for a joystick. Allows control scaling.
| double ADBLib::ctrlCfg::jysCfg::minVal |
Maximum value for a joystick. Allows control scaling.
 1.8.8
1.8.8 
